-S2-P2高防护行星减速机
近年来对轴承工作表面变质层的研究表明,磨削工艺与轴承表面质量的关系密切。轴承使用寿命分析的主要任务,就是根据大量的背景材料、分析数据和失效形式,找出造成轴承失效的主要因素,以便有针对性地提出措施,延长轴承的服役期,避免轴承发生突发性的早期失效。保持轴承及其工作环境的清洁即使是眼睛看不到的小尘埃,也会给外球球面轴承带来坏影响。所以,要保持周围清洁,使尘埃不致侵入轴承。小心谨慎地使用在使用中给与轴承强烈冲击,会产生伤痕及压痕,成为事故的原因。
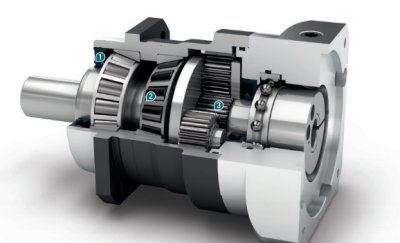
3、率、低背隙:由于齿轮减速机每一组齿轮减速传动时只有单齿面咬合接触,当传动相等扭力时需要更大的齿面应力,因此齿轮设计时必须采用更大之模数与厚度,齿轮模数越大将造成齿轮间偏转公差值变大,相对形成较高齿轮间隙,各段减速比间的累计背隙随之增加。而行星齿轮组合中特有的多点均匀密合,外齿轮环的圆弧包洛结构,使外齿轮环与行星齿轮间紧密结合,齿轮间密合度高,除了提升极高之减速机效率之外,设计本身可达到高精度作用。
一般要考虑以下方面作检查:
1) 电机力矩是否足够大,能否带动负载,因此我们一般用户选型时要选用力矩比实际需要大 50%~ 的电机,因为步进电机不能过负载运行,哪怕是瞬间,都会造成失步,严重时停转或不规则原地反复动。
2) 上位控制器来的输入走步脉冲的电流是否够大(一般要 >10mA ),以使光耦稳定导通,输入的频率是否过高,导致接收不到,如果上位控制器的输出电路是 CMOS 电路,则也要选用 CMOS 输入型的驱动器。
3) 启动频率是否太高,在启动程序上是否设置了加速过程,从电机规定的启动频率内始加速到设定频率,哪怕加速时间很短,否则可能就不稳定,甚至处于惰态。
4) 电机未固定好时,有时会出现此状况,则属于正常。因为,实际上此时造成了电机的强烈共振而导致进入失步状态。电机必须固定好。
5) 对于 5 相电机来说,相位接错,电机也不能工作。
步进电机的转速与脉冲频率成正比,即脉冲频率越高步进电机的转速也越高,但提高了脉冲频率虽然达到了提速作用,却损失了力矩。 力矩随脉冲频率升高而下降的原因: 步进电机产生失步的两个原因就是: 一、控制脉冲频率高,此时转子的加速度小于步进电机定子旋转磁场的速度。 在步进电机供电电源设计好后,定子线圈冲电时间常数基本是固定的,设时间常数是0.02S(0.02S充电到值的63%),如果步进电机接受的脉冲周期大于0.04S(占空比为50%,频率小于25HZ),定子线圈即可以获得足够的能量产生足够带动转子的力矩。如果脉冲频率过高,比如50HZ(占空比为50%,脉冲周期大于0.02S),定子线圈获得的充电时间才0.01S,少了一半的充电时间,产生的力矩就减少了很多,致使转子跟不上定子旋转磁场的速度,每一步都落后于应该到达的平衡位置,并且距离平衡位置越来越远。积累下来的结果就造成了失步. 当然50HZ的频率太小了,本例子只是为了便于说明,随意说了一个数解决方法:1、降低脉冲频率,别认为麻烦,调试步进电机大部分是调节脉冲频率的过程 2、如果不想因降低频率而造成速度太低,那么加大步进电机供电电流 3、减轻电机的负载 二、控制脉冲频率低,此时转子的速度高于步进电机定子旋转磁场的速度。
+
SP 10 S
SP 180 00-151
SP 100S-MF1-3 -4 -5 -7 -10-2G1-2S
-2G1-2S
SP 140S-MF1-3 -4 -5 -7 -10-0K1-1K
SP 210-MC1- br>
SP 060-M 2
SP 060
SP 100S-MC1-3 -4 -5 -7 -10-1E0-2K-PS1
S E0-2K-PS1
SP 060S-MF1-3 -4 -5 -7 -10-1B1-2S
SP 060S- r>
SP 060X-M
SP 060X br>
SP 060-M 0
SP 060
SP 100S-MF1-3 -4 -5 -7 -10-1G0-2S
SP 10 S
SP 060 -2S
SP 0 2S
SP 07 000
SK07 00
SP 075S-MF1-3 -4 -5 -7 -10-OE -2S
SP 1 -000
SP