2-P2强钢性行星齿轮箱
不充分的金属间键常见于冷焊接点或焊接时没有升高到适当温度的焊接点,它可能导致焊接面的切断。相反,太厚的金属合金层,常见于过度加热或焊接太长时间的焊接点,它将导致焊接点抗张强度非常弱。锡角比焊锡的共晶点温度高出大约35℃时,当一滴焊锡放置于热的涂有助焊剂的表面上时,就形成了一个弯月面,在某种程度上,金属表面沾锡的能力可通过弯月面的形状来评估。如果焊锡弯月面有一个明显的底切边,形如涂有油脂的金属板上的水珠,或者甚至趋于球形,则金属为不可焊接的。
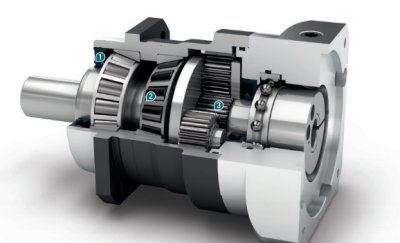
水道镇新机电:行星式PLX142-L2-15-S2-P2强钢性行星齿轮箱
四、曲面齿轮
曲面齿轮是锥齿轮的一种情况,特别之处就是两轮轴线垂直但不相交,有一定的偏移位置。
S2-P2强钢性行星齿轮箱
还以上面的0.02S充电时间常数为例,脉冲频率低,定子线圈充电充分,其产生的力矩就大,此时电机的负载如果较轻,转子就会超过应该到达的平衡位置,定子磁场又要拉转子回到平衡位置,同样其在回平衡位置时又会反越过平衡位置而落后于平衡位置,恰恰此时下一个脉冲到来,于是转子只好在落后于平衡位置的地方始新一轮的步进。如此循环,同样造成每一步都落后于应该到达的平衡位置,并且距离平衡位置越来越远。积累下来的结果就造成了失步。 解决方法:1、提高脉冲频率 2、不想太高速,那么减小步进电机供电电流。 3,上面两者都不能调节,换力矩小的电机。 伺服电机的说明书上一般都会给出矩频特性图,或是力矩与速的关系表。从大多品牌步进电机的矩频特性可以看出,步进电机在小于600转/分的速度时,输出力矩是正常的。超过1000转/分时,力矩急剧下降(当然也有部分电机在1200转/分时,力矩输出正常). 所以将步进电机的转速定为600转/分是较为理想的选择。 当然这个600转/分不是一个通用的数据,具体还得去资讯厂家,向厂家要步进电机的矩频特性。
减速特性 1、高扭力、耐冲击:行星齿轮之机构形同于传统平行齿轮的传动方式。传统齿轮仅依靠两个齿轮间极少数点接触面挤压驱动,所有负荷集中于相接触之少数齿轮面,容易产生齿轮间摩擦与断裂。而行星齿轮减速机具有六个更大面积与齿轮接触面360度均匀负荷,多个齿轮面共同均匀承受瞬间冲击负荷,使其更能承受较高扭矩力之冲击,本体及各轴承零件也不会因高负荷而损坏破裂。 2、体积小、重力轻:传统齿轮减速机的设计皆有多组大小齿轮偏向交错传动减速,由于减速比须由两个齿轮数之倍数值产生,大小齿轮间更要有一定之间距咬合,因此齿箱容纳空间极大,尤其高速比的组合时更需要由两台以上减速齿箱连接组合,结构强度相对减弱,更使齿箱长度加长,造成体积与重量极为庞大。行星减速机的结构可依需求段数重复连接,单独完成多段组合,体积小,重量轻、外观轻巧,相形使设计更有价值感。 3、率、低背隙:由于齿轮减速机每一组齿轮减速传动时只有单齿面咬合接触,当传动相等扭力时需要更大的齿面应力,因此齿轮设计时必须采用更大之模数与厚度,齿轮模数越大将造成齿轮间偏转公差值变大,相对形成较高齿轮间隙,各段减速比间的累计背隙随之增加。而行星齿轮组合中特有的多点均匀密合,外齿轮环的圆弧包洛结构,使外齿轮环与行星齿轮间紧密结合,齿轮间密合度高,除了提升极高之减速机效率之外,设计本身可达到高精度作用。
水道镇新机电:行星式PLX142-L2-15-S2-P2强钢性行星齿轮箱
+
VRL-090 -19DB19
-K5-19DB19
-K5-19EB16
V 5-28HA22
K5-14BL14
K5-19DE19
VRL-090 -28HA24
-K5-28HA24 -K5-19EB19
V 5-19HF16
5-S8ZH8
K5-19DD19
VRL-090 -14BK14
-K5-14BK14
V