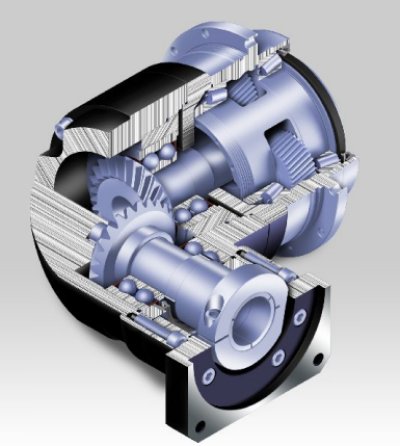
坪乐乡传动装置:步进式ZPLE90-80斜齿行星齿轮箱
钳子的使用莫把钳柄当钳头。切记,切记。使用钳子是用右手操作。将钳口朝内侧,便于控制钳切部位,用小指伸在两钳柄中间来抵住钳柄,张钳头,这样分钳柄灵活。电工常用的钢丝钳有15、172及25mm等多种规格。可根据内线或外线工种需要选购。钳子的齿口也可用来紧固或拧松螺母。钳子的口可用来剖切软电线的橡皮或塑料绝缘层。钳子的口也可用来切剪电线、铁丝。剪8号镀锌铁丝时,应用刃绕表面来回割几下,然后只须轻轻一扳,铁丝即断。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种 转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
为了使行星轮间载荷分布均匀,起初,人们只努力提高齿轮的精度,从而使得行星轮传动的和转配变得比较困难。后来通过实践采取了对行星齿轮传动的基本构件径向不加限制的专门措施和其他可进行自动调位的方法,即采用各种机械式的均载机构,以达到各行星轮间载荷分布均匀的目的。从而,有效地降低了行星齿轮传动的精度和较容易转配,且使行星齿轮传动输入功率能通过所有的行星轮进行传递,即可进行功率分流。
在选用行星齿轮传动均载机构时,根据该机构的功用和工作情况,应对其提出如下几点要求:
(1)载机构在结构上应组成静定系统,能较好地补偿和转配误差及零件的变形,且使载荷分布不均匀系数 值。
(2)均载机构的补偿动作要可靠、均载效果要好。为此,应使均载构件上所受力的较大,因为,作用力大才能使其动作灵敏、准确。
(3)在均载过程中,均载构件应能以较小的自动调整位移量补偿行星齿轮传动存在的误差。
(4)均载机构应容易,结构简单、紧凑、布置方便,不得影响到行星齿轮传动性能。均载机构本身的摩擦损失应尽量小,效率要高。
(5)均载机构应具有一定的缓冲和减振性能;至少不应增加行星齿轮传动的振动和噪声。
2.转子的平均速度高于定子磁场的平均旋转速度 转子的平均速度高于定子磁场的平均旋转速度,这时定子通电励磁的时间较长,大于转子步进一步所需的时间,则转子在步进过程中获得了过多的能量,使得步进电动机产生的输出转矩增大,从而使电动机越步。当用步进电动机驱动那些使负载上、下动作的机构时,更易产生越步现象,这是因为负载向下运动时,电动机所需的转矩减小。解决方法:减小步进 电动机的驱动电流,以便降低步进电动机的输出转矩。 3.步进电动机及所带负载存在惯性 由于步进电动机自身及所带负载存在惯性,使得电动机在工作过程中不能立即起动和停止,而是在起动时出现丢步,在停止时发生越步。解决方法:通过一个加速和减速过程,即以较低的速度起动,而后逐渐加速到某一速度运行,再逐渐减速直至停止。进行合理、平滑 的加减速控制是保证步进驱动系统可靠、、运行的关键。 4.步进电动机产生共振 共振也是引起失步的一个原因。步进电动机处于连续运行状态时,如果控制脉冲的频率等于步进电动机的固有频率,将产生共振。在一个控制脉冲周期内,振动得不到充分衰减,下一个脉冲就来到,因而在共振频率附近动态误差并会导致步进电动机失步。解决方法:适当减小步进电动机的驱动电流;采用细分驱动方法;采用阻尼方法,包括机械阻尼法。以 上方法都能有效消除电动机振荡,避免失步现象发生。