22-110机器人行星减速器
线切割精度一般为±.1~±.2mm,可高达±.4mm。切缝宽度对比激光切割相比等离子切割更精密,切缝小,在.5mm左右。等离子切割切缝较激光切割大,在1-2mm左右。水切割的切缝大约比管直径大1%,一般在.8-1.2mm。随着砂管的直径扩口,其切口也就愈大。线切割的切缝宽度,一般在.1-.2mm左右。切割表面质量对比激光切割的表面精糙度没有水切割好,越厚的材料越明显。
行星减速机的型号与伺服电机的功率如何搭配呢?
通常情况下伺服电机功率与行星减速机型号搭配如下 、配180型号
号
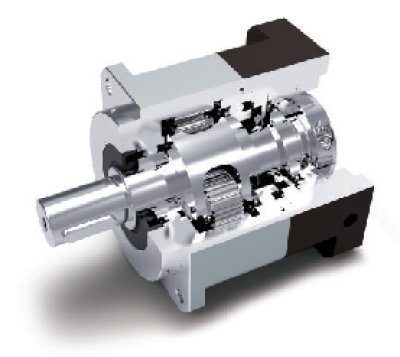
行星减速机的工作原理是由一个内齿圈紧密结合于齿轮箱壳体上,环齿中心有一个自外部动力所驱动太阳轮,介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组该组行星齿轮依靠着出力轴、内齿圈及太阳轮支撑浮游于期间;行星减速机当入力侧动力驱动太阳轮时,可带动行星齿轮自转,并依循着内齿圈之轨迹沿着中心公转,游星之旋转带动连结于行星架出力轴输出动力。根据其工作原理来说行星减速机不具备自锁功能。
蜗轮蜗杆减速机工作原理;蜗轮蜗杆传动的两轴是相互交叉垂直的;蜗杆可以看成为在圆柱体上沿着螺旋线绕有一个齿(单头)或几个齿(多头)的螺旋,蜗轮就象个斜齿轮,但它的齿包着蜗杆。在啮合时,蜗杆转一转,就带动蜗轮转过一个齿(单头蜗杆)或几个齿(多头蜗杆)。蜗轮蜗杆主要作用传递两交错轴之间的运动和动力,轴承与轴主要作用是动力传递、运转并提率。 在蜗轮蜗杆减速机的传动方式中,蜗轮传动具备其他齿轮传动所没有特性,即蜗杆可以轻易转动蜗轮,但蜗轮无法转动蜗杆,这是因为蜗轮蜗杆的结构和传动是通过摩擦实现造成的。蜗轮无法转动蜗杆,从而实现自锁功能。
以上说明得出行星减速机不具备蜗轮蜗杆减速机的自锁功能。
步进电机的基本参数定义
电机固有步距角:
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如FY56ES300A型电机给出的值为0.9°/1.8°(表示 半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为“电机固有步距角”,它不一定是电机工作时的实际步距角,实际步距角和驱动器有关。
步进电机的相数: 是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电动机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三 相的为0.75°/1.5°、五相的为0.36°/0.72° 。步进电动机增加相数能提高性能,但步进电机的结构和驱动电源都会更复杂,成本也会增加。
K5-14BM12
VRL-070 -19DC19
-K5-19DC19
-K5-19HB19
V 5-19EB19
K5-19EB16
K5-14BM14
VRL-070 4DG14