50重载伺服变速箱
批量生产中,偶尔出现工件超差故障原因:必须认真检查工装夹具,且考虑到操作者 ,及装夹的可靠性,由于装夹引起的尺寸变化,必须改善工装使工人尽量避免人为疏忽作出误判现象;数控系统可能受到外界电源的波动或受到干扰后自动产生干扰脉冲,传给驱动致使驱动接受多余的脉冲驱动电机夺走或少走现象,解决方案:了解掌握其规律,尽量采用一些抗干扰的措施,如:强电场干扰的强电电缆与弱号的信号线隔离,加入抗干扰的吸收电容和采用屏蔽线隔离,另外,检查地线是否连接牢固,接地触点 近,采取一切抗干扰措施避免系统受干扰。
日常使用过程当中, 为常见的问题,主要表现为磨损问题。对于一些传统的企业来说,出现此类问题,都会采取补焊或者修复的方法,尽管能够有效,但是依旧存在一定的缺陷。尤其是补焊的时候,因为相应的问题过高,那么在整个过程当中,就会对精密行星减速机造成一定的影响。特别是对油漆,会造成脱落的情况。
-50重载伺服变速箱
步进电机有带 磁性的转子,而定子至少具有两个绕线。当转子磁性与定子绕线保持一致时,将驱动第二个绕线。两个绕线交替启和关闭,这将导致电机锁定在想要的步进位置。通过绕线的电流方向还可反向。
在带有两个定子绕线的步进电机中,有四个步进以 90° 隔。根据向定子绕线的脉冲,可控制步进电机的步进。步进电机的速度控制可通过向绕线脉冲频率实现,而旋转方向可通过反向脉冲序列进行更改。电机内部的极片有许多齿,有助于相对于定子的转子位置。一些步进电机的定子级也有齿。根据使用的控制技术,可全步进、半步进或微步进控制步进电机。简单的方形脉冲可以控制处于全步进的电机,而 控制技术(如脉宽调制 (PWM))可用于微步进。
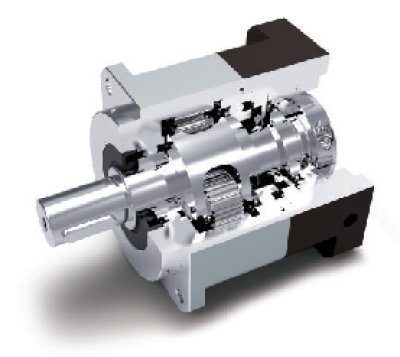
行星减速机的工作原理是由一个内齿圈紧密结合于齿轮箱壳体上,环齿中心有一个自外部动力所驱动太阳轮,介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组该组行星齿轮依靠着出力轴、内齿圈及太阳轮支撑浮游于期间;行星减速机当入力侧动力驱动太阳轮时,可带动行星齿轮自转,并依循着内齿圈之轨迹沿着中心公转,游星之旋转带动连结于行星架出力轴输出动力。根据其工作原理来说行星减速机不具备自锁功能。
蜗轮蜗杆减速机工作原理;蜗轮蜗杆传动的两轴是相互交叉垂直的;蜗杆可以看成为在圆柱体上沿着螺旋线绕有一个齿(单头)或几个齿(多头)的螺旋,蜗轮就象个斜齿轮,但它的齿包着蜗杆。在啮合时,蜗杆转一转,就带动蜗轮转过一个齿(单头蜗杆)或几个齿(多头蜗杆)。蜗轮蜗杆主要作用传递两交错轴之间的运动和动力,轴承与轴主要作用是动力传递、运转并提率。 在蜗轮蜗杆减速机的传动方式中,蜗轮传动具备其他齿轮传动所没有特性,即蜗杆可以轻易转动蜗轮,但蜗轮无法转动蜗杆,这是因为蜗轮蜗杆的结构和传动是通过摩擦实现造成的。蜗轮无法转动蜗杆,从而实现自锁功能。
以上说明得出行星减速机不具备蜗轮蜗杆减速机的自锁功能。
包头 重载伺服变速箱
+
E
EVT-110 F3-19FB19
E
EVT-110 F3-19DE19
E
EVT-110 F3-38KA35
E
EVT-110 F3-28GD24
E
EVT-110 F3-28HF22
E
EVT-110 F3-28HB24
E
EVT-110 F3-28HA24
E
EVT-110 F3-19EC16
E
EVT-110 F3-19DC19
E
EVT-110 F3-28FE24
E
EVT-140 F3-38KA35
E
EVT-140