汤山镇:伺服式BH120A-L2-30-B2-D1-S9直流伺服减速器
在选购线切割机床时应注意哪几个方面的问题:线切割机床是精设备,如前所述 有关部门对它的生产以及精度的检测制定了一系列技术标准,然而由于市场需求大,一些厂为提高产量无视质量,特别是东部一些不具备机床生产条件的私营小企业也在生产线切割机床,以次充好,给广大用户特别是国外用户的选型带来诸多不便,稍有不慎用户自身利益就受侵害,所以在如选型特别是确定商及品牌时就显得尤为重要。首先应根据自己的产品和生产需要确定机床的功能和规格大小,而在选型时用户容易忽略对今后发展的要求,因为机床不是消耗品,虽然一次性投入大但使用寿命却很长,如果只顾眼前不考虑企业自身的发展因素,那么在不久的将来必然出现重复性投资,这种情况的用户我们遇到不少,因此选型时要有一个超前意识,要有发展眼光,也就是说选型时要使自己所选的机床无论在功能上还是在技术水平上都要有所储备。范围1.本规程适用于压铸车间所有压铸模。本规程适用于压铸模在使用、维修、保养过程中应遵守的事项。引用标准:下列文件的有效版本构成本规程的一部 模具术语GB4678.1 件技术条件3.压铸模的使用压铸模成本高,设计精密、复杂,使用时必须按照正确的程序。1预热3.1.1压铸生产前必须将模具预热,预热方法:具备使用模温机的,必须用模温机预热;不具备的模具,可使用外挂式电热模具加热板预热。预热温度23~28℃。使用模温机预热时,首先应把锁模力调松,以免模具预热后膨胀,使锁模过紧。模具预热后,必须重新调整模具的锁紧度。2生产中的模温控制:能够使用模温机的压铸模必须使用,不具备使用模温机的压铸模,可通过喷刷涂料,调节生产节奏达到控制模温。
现场中的精密行星减速机串轴故障均从输入轴的串动而表现出来。造成串轴的原因主要有两个方面:
1、是中间轴上的从动齿轮与轴紧固不牢所致。在实际传动中,往往由于从动齿轮与中间轴之间的过盈量不够,从动齿轮相对中间轴产生轴向串动,进而使输入轴发生轴向串动。因此,过盈量不够是造成串轴的主要原因。另外,精密行星减速机的转向对串轴也有一定的影响。
2、是由于断齿使输入轴失去轴向约束而发生串轴。
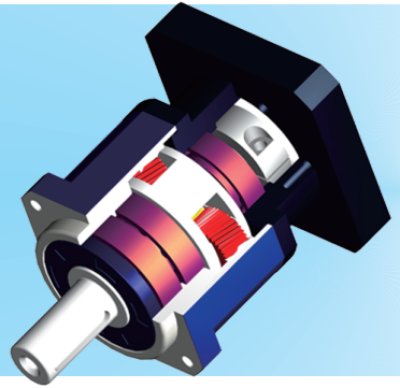
行星齿轮减速机传动的主要特点如下。
1、运动平稳、抗冲击和振动的能力较强 由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同轴减速机同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
2、传动比较大,可以实现运动的与 只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮减速机传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的与以及实现各种变速的复杂的运动。
3、行星齿轮减速机体积小、质量小,结构紧凑,承载能力大 由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。同轴减速机此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。
4、行星齿轮减速机传动效率高 由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97~0.99。
对于机器人行走用的电机,要求是比较高的,不是一般的电机可以胜任的。对于其的选择,我们应该考虑到以下几点: 考虑电机的转动稳定度,即要能很好的锁定其转动角速度,这样对于控制机器人的行走就可以从动力上得到了步的控制,所以需要考虑电机转动时的线性平稳度的问题。这样我们就得用闭环工作的电机,例如:直流伺服电机,直流无刷伺服电机,交流伺服电机,普通无刷电机,步进电机等。 ? 考虑电机的转速,要考虑机器人的行走速度和低速的对准问题。 ? 考虑机器人提速快慢的问题,即电机的扭矩和轮子直径的问题。 ? 考虑机器人供电的问题。 ? 考虑到电机在机器人上的问题。 ? 考虑对电机控制实现的容易程度的问题。 ? 考虑到对电机及其部件的维护和维修问题。 综合上述,我们应当是伺服电机,当然考虑到供电,我们应当选择24V以下直流供电的直流伺服电机或直流无刷伺服电机。虽然步进电机可以有很好的精度,但是步进电机的扭矩太小,不适合机器人的行走电机。普通无刷电机虽然也可以是闭环的,但是其工作时对角速度的锁定能力是远远不能满足我们的需要的,因为他只有三个霍尔传感器用于检测其转子的位置(转速检测)。所以我们的选择就在直流伺服电机或直流无刷伺服电机。
+
-200-S2-P2
0-14-S2-P2
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论