张图片


厦门市思明区
2445414922@qq.com
兰工 点击联系
2024/5/2 10:15:24
已认证
10 分
生产商
| 产品规格 | |
| 产品数量 | 10000 |
| 包装说明 | |
| 价格说明 |
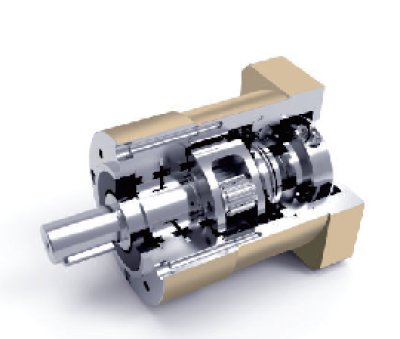
-P2机械手伺服减速机
钳子的使用方法:一般情况下,钳子的强度有限,所以不能够用它操作一般手的力量所达不到的工作。特别是型号较小的或者普通尖嘴钳,用它弯折强度大的棒料板材时都可能将钳口损坏。一般的克丝钳有三个刃口,只能够用来剪断铁丝不能够用来剪断钢丝。钳柄只能用手握,不能用其他方法加力。那么日常生活中的钳子有多少种类呢?我先再来和大家介绍一下!电工常用的克丝钳有1172及25mm等多种规格。可根据内线或外线工种需要选购。
三、伞齿轮
伞状齿轮是依据平截头圆锥体分配的。圆柱齿轮的节圆柱成为分圆锥,齿的横剖面的尺寸是不同的。为了方便起见,锥齿轮的大头端部的参数和尺寸作为标准值。习惯上锥齿轮相互作用的轴彼此不是平行的,通常两轴线彼此成为90度。两个相互齿合的齿轮仅仅为了变向或许有一样的齿数,又或者为了改变速度和方向而齿数不同。
为了使行星轮间载荷分布均匀,起初,人们只努力提高齿轮的精度,从而使得行星轮传动的和转配变得比较困难。后来通过实践采取了对行星齿轮传动的基本构件径向不加限制的专门措施和其他可进行自动调位的方法,即采用各种机械式的均载机构,以达到各行星轮间载荷分布均匀的目的。从而,有效地降低了行星齿轮传动的精度和较容易转配,且使行星齿轮传动输入功率能通过所有的行星轮进行传递,即可进行功率分流。
在选用行星齿轮传动均载机构时,根据该机构的功用和工作情况,应对其提出如下几点要求:
(1)载机构在结构上应组成静定系统,能较好地补偿和转配误差及零件的变形,且使载荷分布不均匀系数 值。
(2)均载机构的补偿动作要可靠、均载效果要好。为此,应使均载构件上所受力的较大,因为,作用力大才能使其动作灵敏、准确。
(3)在均载过程中,均载构件应能以较小的自动调整位移量补偿行星齿轮传动存在的误差。
(4)均载机构应容易,结构简单、紧凑、布置方便,不得影响到行星齿轮传动性能。均载机构本身的摩擦损失应尽量小,效率要高。
(5)均载机构应具有一定的缓冲和减振性能;至少不应增加行星齿轮传动的振动和噪声。
伺服马达和步进马达的区别 步进马达,它是直流脉冲控制的,一般说来功率比较小,用于精度要求不高的环自控系统中,它有一个缺点是容易失步!伺服马达分为交流和直流两大类,功率相对教大,精度高;两者主要的区别是看马达的端部是否有光电编码器!伺服马达就是靠光电编码器来反馈位置信号的.顺便提一下闭环控制又可分半闭环和全闭环两种,但是普遍使用的是半闭环装置,只有非常精密的设备才用全闭环装置,如8#楼所说的 一个就是全闭环装置, 如何正确选择伺服电机和步 1,如何正确选择伺服电机和步进电机? 主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界 面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是直流还是交流电源,或电池供电,电压范围。据此以确定电机和配用驱动器或控制器 的型号。
LB5-KLB8
2-KLB5-KLB8< 6-7-8-10-KLB KLB5-KLB8
相关产品



