张图片


厦门市思明区
2445414922@qq.com
兰工 点击联系
2024/4/27 6:59:10
已认证
10 分
生产商
| 产品规格 | |
| 产品数量 | 10000 |
| 包装说明 | |
| 价格说明 |
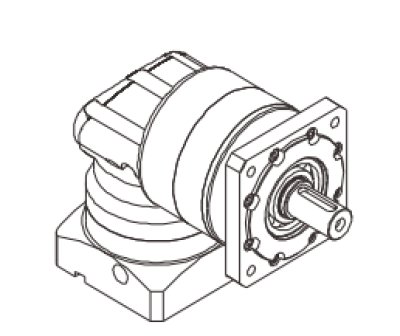
-K7-14一段式行星减速器
准备与管道连接前,须冲洗和干净管道中残存的杂质(这些物质可能会损坏阀座和球芯)。带执行机构平衡阀前应按规定的信号(电或气)进行整机测试(防止因运输产生振动影响使用性能),合格后方可上线(接线按电动执行机构线路图)。在期间,请不要用阀的执行机构部分作为起重的吊装点,以避免损坏执行机构及附件。与管道连接后,请用规定的扭矩交叉锁紧法兰连接螺栓。本类阀应在管道的水平方向或垂直方向。
行星减速机在设计时要考虑以下要求:
一、行星减速机设计时原始和数据。例如:原电机的类型、规格、转速、工作机械的类型等等。
二、初定各项工艺方法及参数。
三、选定行星减速机的类型和形式。
四、初定计算齿轮中心距的模数及几何参数。
五、确定传动级数。依照总传动比,确定传动的级数和各级传动比。
六、整体方案设计,要确定行星减速机的结构、轴的尺寸、轴承型号等等。
七、要确定齿轮渗碳深度。
八、要确定行星减速机的附件。
九、冷却润滑的计算。
十、要选定行星减速机的类型和方式。
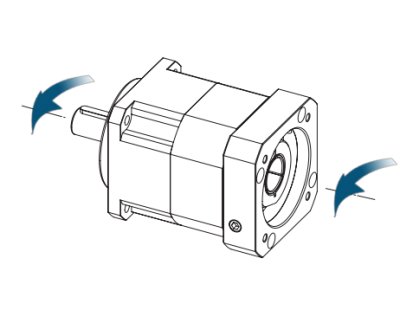
一般情况下行星减速机是配伺服电机和步进电机使用,为了提升电机的扭矩,减少成本。
为了使行星轮间载荷分布均匀,有多种多样的均载方法。对于主要靠机械的方法来实现均载的系统,其结构类型可分为两种:
1、静定系统
该系统的均载原理是通过系统中附加的自由度来实现均载的。
2、静不定系统
均载机构:
1、基本构件浮动的均载机构
(1) 中心轮a浮动 (2)内齿轮b浮动 (3)转臂H浮动 (4)中心轮a与转臂H同时浮动 (5)中心轮a与内齿轮b同时浮动 (6)组成静定结构的浮动
2、杠杆联动均载机构
本次所设计行星齿轮是静定系统,基本构件中心轮a浮动的均载机构。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为 )的特点,广泛应用于各种环控制。现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。 永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度 反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。 混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用 为广泛,也是本次细分驱动方案所选用的步进电机。
0-60-P2-S2 0-60-P1-S2
相关产品





