张图片


厦门市思明区
2445414922@qq.com
兰工 点击联系
2024/4/30 17:00:16
已认证
10 分
生产商
| 产品规格 | |
| 产品数量 | 10000 |
| 包装说明 | |
| 价格说明 |
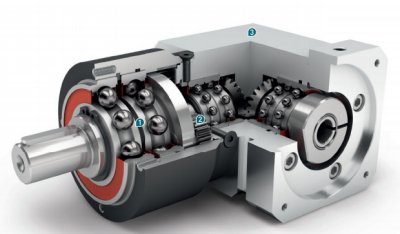
2-P2重载步进减速机
采用激光干涉仪测试各项误差源则是目前普遍通行的法,其各项测试结果均具备精度可溯源性,可以逐项测量并校核机床精度是否测量正确、稳定可靠,并能方便地随时校核空间补偿效果。市场上 为普遍应用的英国产XL-8激光干涉仪还具有放的软件接口,方便用户自行研究发自己的软件。应用举图2所示。针对Fanuc31i和Siemens84D展空间误差补偿所需软、硬件设备1检测设备XL-8激光干涉仪:分别测量线性位移、直线度、俯仰角、扭摆角等,为RVC软件所需计算补偿参数所需误差数据文件。
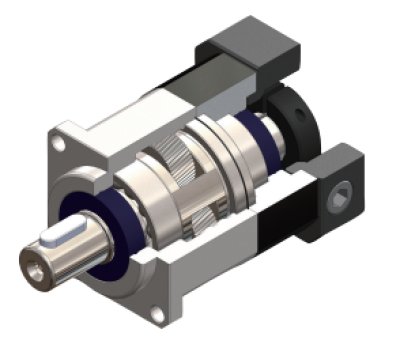
行星减速机为什么会出现断轴其中的原因有哪些
1、在加速和减速的过程中,行星减速机输出轴所乘受瞬间的扭矩如果超过了其额定输出扭矩的2倍,并且这种加速和减速又过于频繁,那么 终也会使其断轴。考虑到这种情况出现的较少,故这里不再进一步介绍。
2、错误的选型致使所配行星减速机出力不够。有些用户在选型时,误认为只要所选减速机的额定输出扭矩满足工作要求就可以了,其实不然,一是所配电机额定输出扭矩乘上减速比,得到的数值原则上要小于产品样本的相近减速机的额定输出扭矩,二是同时还要考虑其驱动电机的过载能力及实际中所需工作扭矩。理论上,用户所需工作扭矩一定要小于额定输出扭矩的2倍。尤其是有些应用场合必须严格遵守这一准则,这不仅是对减速机里面齿轮的保护,更主要的是避免输出轴就被扭断。这主要是因为,如果设备有问题,减速机的输出轴及其负载被卡住了,这时驱动电机的过载能力依然会使其不断加大出力,进而,可能使输出轴承受的力超过其额定输出扭矩的2倍而扭断行星减速机的输出轴。
3、同样输出轴也有折断或弯曲现象发生,其原因与驱动电机的断轴原因相同。但减速机的出力是驱动电机出力和减速比之积,相对于电机来讲出力更大,故输出轴更易被折断。因此,用户在使用行星减速机时,对其输出端装配同心度的保证也应十分注意。
行星减速机是一种应用广泛的减速机,它的主要传动结构为:行星轮,太阳轮,外齿圈,并合着线针齿啮合的转动方式来工作。 由于减速机的这种转动结构,使得它的单级减速一般在3-10 行星减速机是由针齿啮合来工作转动的,由于行星齿轮的套数一套齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求,但同时2级或3级减速机的长度会有所增加,导致效率会有所下降。 前面说过它主要传动结构为:行星轮,太阳轮,外齿圈 ,使得行星减速机多数是在步进电机和伺服电机上,行星我们都知道行星是围绕着太阳运动的有着不同的轨迹方式,同样行星减速机的这种结构也决定了它的几种不同工作转动方式: 1)太阳轮固定,齿圈主动,行星架被动,它的转向相同这种组合为降 圈固定,行星架主动,太阳轮被动,它的转向相同这种组合为升速传动,传动比一般为0.2~0.4 3)齿圈固定,太阳轮主动,行星架被动,它的转向相同这种组合为降速传动,通常传动比一般为2.5~5 4)太阳轮固定,行星架主动,齿圈被动,它的转向相同这种组合为升速传动,传动比一般为0.6~0.8 5)行星架固定,齿圈主动,太阳轮被动,它的转向相反这种组合为升速传动,传动比一般为0.25~0.67 6)行星架固定,太阳轮主动,齿圈被动,它的转向相反这种组合为降速传动,传动比一般为1.5~4 由于结构的原因,使得它的传动种类不同能广泛应用于各类传动机械行业中。
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
关于伺服电机术语:
或剩余力矩:在没有电流通过绕组时,能使电机的输出轴旋转所需用施加的力矩。
驱动器:一个用来运行步进电机的电气控制装置。这包括电源、逻辑程序器、关元件以及一个确定步进速率的变频脉冲源。
动态力矩:在一定步进速率下电机所产生的力矩。动态力矩可由PULL IN(牵入)力矩或 PULL OUT(牵出)力矩所表示。
保持力矩:绕组在通以稳态直流电时,能使电机的输出轴旋转所需施加的力矩。
惯性:物体对加速或减速的惯性测量值。此处用于指电机所要负载的惯性,或电机转子的惯性。
线性步进增长(或称步长):转子每旋转一个步距角导螺杆所产生的线性行程。
温升:由电阻上拉方式决定,电机在通风的环境中,保持线圈中的电流恒定。
+
19HB19
V 7-19FB19
K7-19DE19
K7-38KA35
VRL-120 -28GD24
-K7-28GD24 -K7-28HF24
V 7-28FC24
K7-19GB19
K7-19DC19
VRL-120
相关产品





