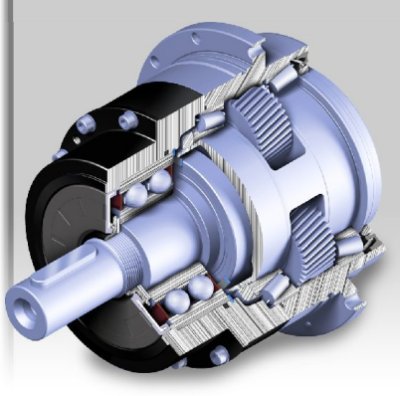
B1-S4圆法兰行星减速器
副后角、副偏角较小,使副后面与工件已面有较长的接触面积,达到修整切削谷峰轨迹、降低表面粗糙度的目的。主偏角为9,既能降低径向切削抗力,又能适应多台阶零件的。半精车机夹车多用于粗和半精,切削时多带有冲击负荷,对切削时有冲击负荷的具主偏角通常设为45和8两种,切削时不带冲击负荷的具主偏角通常为9。主偏角45和8的半精车机夹车尖角为9,以增强尖强度;主偏角为9的半精车机夹车尖角为8。
蜗轮蜗杆减速机工作原理;蜗轮蜗杆传动的两轴是相互交叉垂直的;蜗杆可以看成为在圆柱体上沿着螺旋线绕有一个齿(单头)或几个齿(多头)的螺旋,蜗轮就象个斜齿轮,但它的齿包着蜗杆。在啮合时,蜗杆转一转,就带动蜗轮转过一个齿(单头蜗杆)或几个齿(多头蜗杆)。蜗轮蜗杆主要作用传递两交错轴之间的运动和动力,轴承与轴主要作用是动力传递、运转并提率。 在蜗轮蜗杆减速机的传动方式中,蜗轮传动具备其他齿轮传动所没有特性,即蜗杆可以轻易转动蜗轮,但蜗轮无法转动蜗杆,这是因为蜗轮蜗杆的结构和传动是通过摩擦实现造成的。蜗轮无法转动蜗杆,从而实现自锁功能。
以上说明得出行星减速机不具备蜗轮蜗杆减速机的自锁功能。
正确的、维护行星齿轮减速机,是保证行星减速机正常运行的关键。因此,在您行星齿轮减速机时,请务必严格根据下面的次序,认真地。
步:前应确认电机和行星齿轮减速机是否齐备无损,而且严格驱动电机与减速机相毗连的各部位尺寸是否对中。这里指的是驱动电机法兰的凸台和轴径与减速机法兰的凹槽和孔径间的尺寸及共同公役;擦拭处置处罚共同外貌的污物与毛。
第二步:旋下减速机法兰侧面的工艺孔上的螺堵,旋动减速机的输入端,使抱紧内六角螺钉帽与工艺孔对齐,插入内六角东西旋松抱紧内六角螺钉。
第三步:驱动电机,使其轴上之键槽与减速机输入端孔抱紧螺钉垂直,将驱动电机轴插入减速机输入端孔。插入时必须包管两者同心度同等和二侧法兰平行。好像心度差别等或二侧法兰不屈行必须查明缘故原由。别的,在安置时,严禁用锤击,即可以防备锤击的轴向力或径向力过大破坏两者轴承,又可以通过装置手感来果断两者共同是否符合。果断两者共同同心度和法兰平行的要领为:两者相互插入后,两者法兰根本贴紧,漏洞同等。
第四步:为包管两者法兰毗连受力匀称,先将驱动电机紧固螺钉恣意旋上,但不要旋紧;然后按对角位置渐渐旋紧四个紧固螺钉;末了旋紧行星齿轮减速机输入端孔抱紧螺钉。肯定要先旋紧驱动电机紧固螺钉后再旋紧减速机输入端孔抱紧螺钉。细致:减速机与机器设置装备部署间的准确安置类同于行星齿轮减速器与驱动电机间的准确安置。关键是要必须保证行星减速机输出轴与所驱动部门输入轴同心度的对中。
随着控制电机应用的不停深入生长,行星齿轮减速机在活动控制传动范畴中的应用也会越来越多。
在PMSM中,需要正弦波电流,电流幅值由转子瞬时位置决定,电机工作时所有三相绕组同时导通,需要连续的位置传感器,在速度伺服系统中仍需连续位置传感器,空间机电系统中 常见的位置传感器有旋转变压器+RDC解码模块、光电编码器和同步感应器+RDC解码模块。BLDCM构成的速度伺服系统中,只需要一个低分辨率的传感器,从这一点看,如果换相引起的转矩波动可以接受,BLDCM比PMSM更适合于速度伺服系统,而在位置伺服系统中,由于需要位置传感器,BLDCM与PMSM相比没有优势。 对于电机电流传感器,BLDCM和PMSM伺服系统一般只需要两个电流传感器测量两个绕组电流,第三个绕组电流可以由两个电流测量值推算出来。 常见的电流传感器是霍尔电流传感器。
+
W